'/%3e%3cpath%20d='M111.397%20125.67L105.593%20135.713L99.7989%20145.753L95.1406%20137.679L94.0069%20135.713L91.5066%20131.394C91.2954%20131.003%2091.0745%20130.62%2090.8342%20130.239L90.7735%20130.129L75.0581%20102.898V100.519C75.0581%2097.7732%2077.2837%2095.5476%2080.0292%2095.5476H94.0069L95.1406%2097.5163L111.397%20125.67Z'%20fill='white'/%3e%3cpath%20d='M72.2629%2076.2687C72.2629%2083.3627%2078.0137%2089.1134%2085.1076%2089.1134C92.2015%2089.1134%2097.9523%2083.3627%2097.9523%2076.2687C97.9523%2069.1748%2092.2015%2063.4241%2085.1076%2063.4241C78.0137%2063.4241%2072.2629%2069.1748%2072.2629%2076.2687Z'%20fill='url(%23paint1_linear_846_105547)'/%3e%3cpath%20d='M166.012%20105.461L166.012%20165.848C166.012%20171.375%20170.493%20175.856%20176.021%20175.856C181.549%20175.856%20186.03%20171.375%20186.03%20165.848L186.03%20105.461C186.03%2099.9332%20181.549%2095.4521%20176.021%2095.4521C170.493%2095.4521%20166.012%2099.9332%20166.012%20105.461Z'%20fill='url(%23paint2_linear_846_105547)'/%3e%3cpath%20d='M146.11%20125.782C148.653%20121.377%20155.386%20123.182%20155.386%20128.267V175.877H135.306V144.499L140.374%20135.714L146.11%20125.782Z'%20fill='url(%23paint3_linear_846_105547)'/%3e%3cpath%20d='M95.1412%20137.681V145.755C95.1475%20150.77%2093.8956%20155.707%2091.5%20160.113L90.7718%20161.358C87.1636%20167.312%2081.6081%20171.835%2075.0466%20174.161V102.9L90.7621%20130.131L90.8228%20130.241L91.4952%20131.396L93.9955%20135.715L95.1412%20137.681Z'%20fill='url(%23paint4_linear_846_105547)'/%3e%3cpath%20d='M196.133%2095.5476H176.053C170.508%2095.5476%20166.012%20100.043%20166.012%20105.589C166.012%20111.134%20170.508%20115.63%20176.053%20115.63H196.133C201.679%20115.63%20206.175%20111.134%20206.175%20105.589C206.175%20100.043%20201.679%2095.5476%20196.133%2095.5476Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_846_105547'%20x1='125.887'%20y1='95.5476'%20x2='125.887'%20y2='165.835'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_846_105547'%20x1='85.1076'%20y1='63.4241'%20x2='85.1076'%20y2='89.1134'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint2_linear_846_105547'%20x1='186.03'%20y1='95.4521'%20x2='186.03'%20y2='175.856'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint3_linear_846_105547'%20x1='145.346'%20y1='109.718'%20x2='145.346'%20y2='175.877'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint4_linear_846_105547'%20x1='85.0939'%20y1='102.9'%20x2='85.0939'%20y2='174.161'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
위치 측위의 오차와 최적화 방법
1. 소개
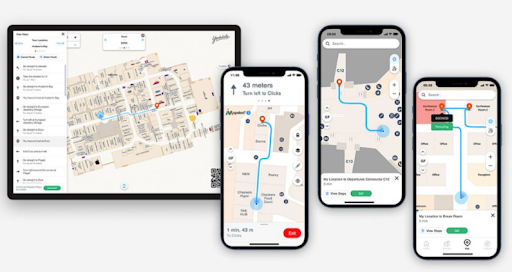
위치 측위의 오차는 디지털 지도, 자산 추적 및 실내 내비게이션과 같이 높은 정확도를 요구하는 애플리케이션에서 위치 측위 시스템의 정확도에 영향을 미치는 중요한 문제입니다. 오차는 신호 간섭, 다중 경로 반사, 하드웨어 오류, 환경 요인 및 데이터 처리 알고리즘과 같은 다양한 원인에서 발생할 수 있습니다.
2. 위치 측위의 오차 원인
2.1. 신호 간섭
신호 간섭은 특히 GPS, WiFi, 블루투스 또는 UWB와 같은 무선 전파 기반 방법의 정확도를 저하시킬 수 있습니다. 간섭 원인에는 다음이 포함됩니다:
- 같은 주파수 범위에서 작동하는 다른 전자 장치
- 벽, 유리, 금속과 같은 물리적 구조물이 신호를 저하시킴
- 다른 무선 시스템의 간섭
2.2. 다중 경로 효과(Multipath Effect)
다중 경로 반사는 벽, 천장, 바닥과 같은 표면에 의해 반사되어 신호가 여러 방향에서 도달할 때 발생합니다. 이로 인해 실제 거리나 위치를 측정하는 데 오차가 발생합니다.
2.3. 하드웨어 오차
센서, 안테나 및 측정 장치는 해상도와 감도의 한계로 인해 고유한 오차를 가질 수 있습니다. 예를 들면:
- IMU(관성 측정 장치) 센서는 시간이 지남에 따라 오차가 누적될 수 있습니다.
- 저가형 GPS 장치는 일반적으로 전문 장치보다 정확도가 낮습니다.
2.4. 환경 영향
날씨, 온도, 습도와 같은 환경 조건도 신호 특성을 변화시켜 위치 측위의 오차를 발생시킬 수 있습니다.
2.5. 처리 알고리즘 오차
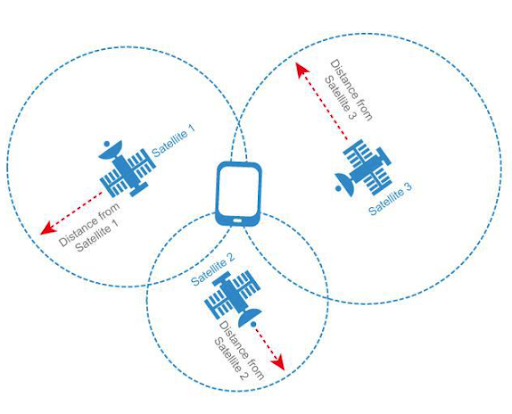
위치 데이터 처리 알고리즘은 적절하게 보정되지 않으면 오차를 유발할 수 있습니다. 삼변측량, 지문 인식 또는 칼만 필터와 같은 알고리즘은 입력 데이터가 부정확한 경우 성능이 저하될 수 있습니다.
3. 위치 측위 오차의 최적화 방법
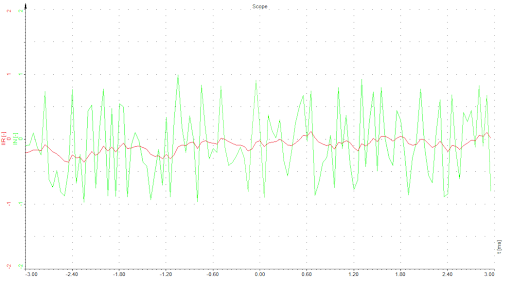
3.1. 신호 필터링 알고리즘 사용
- 칼만 필터: 여러 소스의 데이터를 결합하여 노이즈를 줄이고 정확도를 향상시킵니다.
- 파티클 필터: 장애물이 많은 환경에 효과적이며 실내 위치 측위 향상에 도움이 됩니다.
- AI & 머신 러닝: 수집된 데이터를 기반으로 오차를 예측하고 보정하기 위해 인공 지능을 활용합니다.
3.2. 여러 위치 측위 기술 결합
- GPS + IMU: GPS 신호가 약할 때 오차를 줄이기 위해 GPS 위치 측위와 관성 센서를 결합합니다.
- WiFi + BLE + UWB: 다양한 기술을 사용하여 보정하고 정확도를 향상시킵니다.
3.3. 하드웨어 인프라 개선
- 감쇠를 줄이기 위해 더 강력한 전력의 신호 송신기를 사용합니다.
- 측정 지점 간의 거리를 줄이기 위해 더 많은 신호 비콘을 추가하여 정확도를 높입니다.
- 하드웨어 오차를 줄이기 위해 고급 센서를 사용합니다.
3.4. 데이터 처리 및 보정
- 과거 데이터를 기반으로 보정 모델을 구축합니다.
- 실제 조건에 따라 신호 처리 알고리즘을 업데이트합니다.
- 통계적 방법을 사용하여 오차 보정 기술을 적용합니다.
3.5. 다중 경로 효과 감소
- 반사된 신호를 식별하고 제거하는 알고리즘을 사용합니다.
- 더 명확한 신호 경로를 만들기 위해 공간 인프라를 설정합니다.
- 직접 신호와 반사 신호를 더 잘 구별할 수 있는 UWB 기술을 적용합니다.
4. 결론
위치 측위 오차는 중요한 과제이지만 다양한 방법을 통해 최적화할 수 있습니다. 기술 결합, 하드웨어 인프라 개선, 고급 처리 알고리즘 적용 및 데이터 보정은 위치 측위 시스템의 정확도를 향상시키는 데 도움이 됩니다. 특정 애플리케이션에 따라 기업은 최고의 성능을 달성하기 위해 적절한 방법을 선택해야 합니다.


목차