'/%3e%3cpath%20d='M111.397%20125.67L105.593%20135.713L99.7989%20145.753L95.1406%20137.679L94.0069%20135.713L91.5066%20131.394C91.2954%20131.003%2091.0745%20130.62%2090.8342%20130.239L90.7735%20130.129L75.0581%20102.898V100.519C75.0581%2097.7732%2077.2837%2095.5476%2080.0292%2095.5476H94.0069L95.1406%2097.5163L111.397%20125.67Z'%20fill='white'/%3e%3cpath%20d='M72.2629%2076.2687C72.2629%2083.3627%2078.0137%2089.1134%2085.1076%2089.1134C92.2015%2089.1134%2097.9523%2083.3627%2097.9523%2076.2687C97.9523%2069.1748%2092.2015%2063.4241%2085.1076%2063.4241C78.0137%2063.4241%2072.2629%2069.1748%2072.2629%2076.2687Z'%20fill='url(%23paint1_linear_846_105547)'/%3e%3cpath%20d='M166.012%20105.461L166.012%20165.848C166.012%20171.375%20170.493%20175.856%20176.021%20175.856C181.549%20175.856%20186.03%20171.375%20186.03%20165.848L186.03%20105.461C186.03%2099.9332%20181.549%2095.4521%20176.021%2095.4521C170.493%2095.4521%20166.012%2099.9332%20166.012%20105.461Z'%20fill='url(%23paint2_linear_846_105547)'/%3e%3cpath%20d='M146.11%20125.782C148.653%20121.377%20155.386%20123.182%20155.386%20128.267V175.877H135.306V144.499L140.374%20135.714L146.11%20125.782Z'%20fill='url(%23paint3_linear_846_105547)'/%3e%3cpath%20d='M95.1412%20137.681V145.755C95.1475%20150.77%2093.8956%20155.707%2091.5%20160.113L90.7718%20161.358C87.1636%20167.312%2081.6081%20171.835%2075.0466%20174.161V102.9L90.7621%20130.131L90.8228%20130.241L91.4952%20131.396L93.9955%20135.715L95.1412%20137.681Z'%20fill='url(%23paint4_linear_846_105547)'/%3e%3cpath%20d='M196.133%2095.5476H176.053C170.508%2095.5476%20166.012%20100.043%20166.012%20105.589C166.012%20111.134%20170.508%20115.63%20176.053%20115.63H196.133C201.679%20115.63%20206.175%20111.134%20206.175%20105.589C206.175%20100.043%20201.679%2095.5476%20196.133%2095.5476Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_846_105547'%20x1='125.887'%20y1='95.5476'%20x2='125.887'%20y2='165.835'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_846_105547'%20x1='85.1076'%20y1='63.4241'%20x2='85.1076'%20y2='89.1134'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint2_linear_846_105547'%20x1='186.03'%20y1='95.4521'%20x2='186.03'%20y2='175.856'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint3_linear_846_105547'%20x1='145.346'%20y1='109.718'%20x2='145.346'%20y2='175.877'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint4_linear_846_105547'%20x1='85.0939'%20y1='102.9'%20x2='85.0939'%20y2='174.161'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
Sai số trong định vị và các phương pháp tối ưu
1. Giới thiệu
Sai số trong định vị là một vấn đề quan trọng ảnh hưởng đến độ chính xác của các hệ thống định vị, đặc biệt trong các ứng dụng yêu cầu độ chính xác cao như bản đồ số, theo dõi tài sản và điều hướng trong nhà. Sai số có thể xuất phát từ nhiều nguyên nhân khác nhau như nhiễu tín hiệu, phản xạ đa đường, sai số phần cứng, môi trường và thuật toán xử lý dữ liệu.
2. Các nguyên nhân gây sai số trong định vị
2.1. Nhiễu tín hiệu
Nhiễu tín hiệu có thể làm giảm độ chính xác của hệ thống định vị, đặc biệt là các phương pháp dựa trên sóng vô tuyến như GPS, WiFi, Bluetooth hay UWB. Các nguồn gây nhiễu bao gồm:
- Thiết bị điện tử khác hoạt động trong cùng dải tần số
- Cấu trúc vật lý như tường, kính, kim loại làm suy giảm tín hiệu
- Can nhiễu từ hệ thống không dây khác
2.2. Phản xạ đa đường (Multipath Effect)
Phản xạ đa đường xảy ra khi tín hiệu đến từ nhiều hướng do bị phản xạ bởi các bề mặt như tường, trần nhà, sàn. Điều này gây ra sai số trong việc đo khoảng cách hoặc vị trí thực tế.
2.3. Sai số phần cứng
Các cảm biến, ăng-ten và thiết bị đo lường có thể có sai số nội tại do giới hạn về độ phân giải và độ nhạy. Ví dụ:
- Cảm biến IMU (Inertial Measurement Unit) có thể tích lũy sai số theo thời gian.
- Các thiết bị GPS giá rẻ thường có độ chính xác thấp hơn các thiết bị chuyên dụng.
2.4. Ảnh hưởng của môi trường
Các điều kiện môi trường như thời tiết, nhiệt độ, độ ẩm cũng có thể làm thay đổi đặc tính của tín hiệu, gây sai số trong định vị.
2.5. Sai số từ thuật toán xử lý
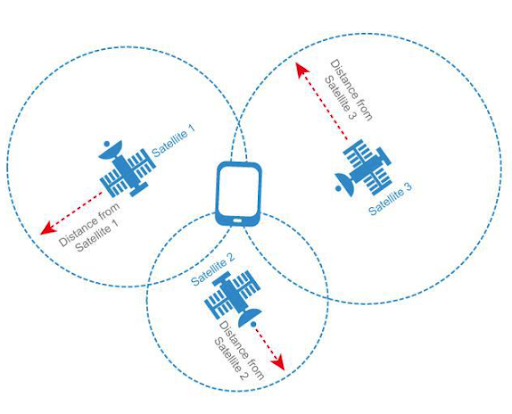
Thuật toán xử lý dữ liệu định vị có thể dẫn đến sai số nếu không được hiệu chỉnh đúng cách. Các thuật toán như trilateration, fingerprinting hoặc Kalman Filter có thể hoạt động kém hiệu quả nếu dữ liệu đầu vào không chính xác.
3. Các phương pháp tối ưu sai số trong định vị
3.1. Sử dụng thuật toán lọc tín hiệu
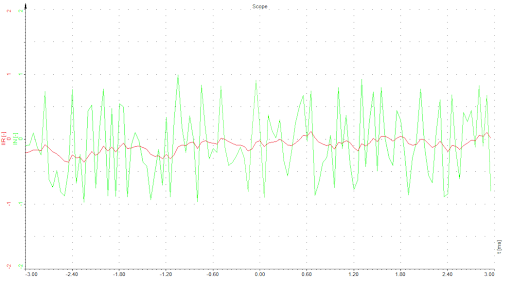
- Kalman Filter: Giảm nhiễu và cải thiện độ chính xác bằng cách kết hợp dữ liệu từ nhiều nguồn.
- Particle Filter: Hiệu quả cho các môi trường có nhiều vật cản, giúp cải thiện định vị trong nhà.
- AI & Machine Learning: Tận dụng trí tuệ nhân tạo để dự đoán và hiệu chỉnh sai số dựa trên dữ liệu thu thập.
3.2. Kết hợp nhiều công nghệ định vị
- GPS + IMU: Kết hợp định vị GPS với cảm biến quán tính giúp giảm sai số khi tín hiệu GPS yếu.
- WiFi + BLE + UWB: Dùng nhiều công nghệ khác nhau để hiệu chỉnh và nâng cao độ chính xác.
3.3. Cải thiện hạ tầng phần cứng
- Sử dụng các thiết bị phát tín hiệu có công suất mạnh hơn để giảm suy hao.
- Đặt thêm các trạm phát tín hiệu (beacon) để giảm khoảng cách giữa các điểm đo, tăng độ chính xác.
- Dùng cảm biến cao cấp hơn để giảm sai số phần cứng.
3.4. Xử lý và hiệu chỉnh dữ liệu
- Xây dựng mô hình hiệu chỉnh dựa trên dữ liệu lịch sử.
- Cập nhật thuật toán xử lý tín hiệu theo điều kiện thực tế.
- Áp dụng kỹ thuật hiệu chỉnh sai số bằng phương pháp thống kê.
3.5. Giảm ảnh hưởng của phản xạ đa đường
- Sử dụng thuật toán xác định và loại bỏ tín hiệu bị phản xạ.
- Thiết lập hạ tầng không gian sao cho tín hiệu có đường truyền rõ ràng hơn.
- Áp dụng công nghệ UWB có khả năng phân biệt tốt hơn giữa tín hiệu trực tiếp và phản xạ.
4. Kết luận
Sai số trong định vị là một thách thức lớn nhưng có thể được tối ưu hóa thông qua nhiều phương pháp khác nhau. Việc kết hợp các công nghệ, cải thiện hạ tầng phần cứng, áp dụng thuật toán xử lý tiên tiến và hiệu chỉnh dữ liệu sẽ giúp nâng cao độ chính xác của hệ thống định vị. Tùy vào từng ứng dụng cụ thể, doanh nghiệp nên lựa chọn phương pháp phù hợp để đạt hiệu suất cao nhất.