'/%3e%3cpath%20d='M111.397%20125.67L105.593%20135.713L99.7989%20145.753L95.1406%20137.679L94.0069%20135.713L91.5066%20131.394C91.2954%20131.003%2091.0745%20130.62%2090.8342%20130.239L90.7735%20130.129L75.0581%20102.898V100.519C75.0581%2097.7732%2077.2837%2095.5476%2080.0292%2095.5476H94.0069L95.1406%2097.5163L111.397%20125.67Z'%20fill='white'/%3e%3cpath%20d='M72.2629%2076.2687C72.2629%2083.3627%2078.0137%2089.1134%2085.1076%2089.1134C92.2015%2089.1134%2097.9523%2083.3627%2097.9523%2076.2687C97.9523%2069.1748%2092.2015%2063.4241%2085.1076%2063.4241C78.0137%2063.4241%2072.2629%2069.1748%2072.2629%2076.2687Z'%20fill='url(%23paint1_linear_846_105547)'/%3e%3cpath%20d='M166.012%20105.461L166.012%20165.848C166.012%20171.375%20170.493%20175.856%20176.021%20175.856C181.549%20175.856%20186.03%20171.375%20186.03%20165.848L186.03%20105.461C186.03%2099.9332%20181.549%2095.4521%20176.021%2095.4521C170.493%2095.4521%20166.012%2099.9332%20166.012%20105.461Z'%20fill='url(%23paint2_linear_846_105547)'/%3e%3cpath%20d='M146.11%20125.782C148.653%20121.377%20155.386%20123.182%20155.386%20128.267V175.877H135.306V144.499L140.374%20135.714L146.11%20125.782Z'%20fill='url(%23paint3_linear_846_105547)'/%3e%3cpath%20d='M95.1412%20137.681V145.755C95.1475%20150.77%2093.8956%20155.707%2091.5%20160.113L90.7718%20161.358C87.1636%20167.312%2081.6081%20171.835%2075.0466%20174.161V102.9L90.7621%20130.131L90.8228%20130.241L91.4952%20131.396L93.9955%20135.715L95.1412%20137.681Z'%20fill='url(%23paint4_linear_846_105547)'/%3e%3cpath%20d='M196.133%2095.5476H176.053C170.508%2095.5476%20166.012%20100.043%20166.012%20105.589C166.012%20111.134%20170.508%20115.63%20176.053%20115.63H196.133C201.679%20115.63%20206.175%20111.134%20206.175%20105.589C206.175%20100.043%20201.679%2095.5476%20196.133%2095.5476Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_846_105547'%20x1='125.887'%20y1='95.5476'%20x2='125.887'%20y2='165.835'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_846_105547'%20x1='85.1076'%20y1='63.4241'%20x2='85.1076'%20y2='89.1134'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint2_linear_846_105547'%20x1='186.03'%20y1='95.4521'%20x2='186.03'%20y2='175.856'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint3_linear_846_105547'%20x1='145.346'%20y1='109.718'%20x2='145.346'%20y2='175.877'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint4_linear_846_105547'%20x1='85.0939'%20y1='102.9'%20x2='85.0939'%20y2='174.161'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
位置測位における誤差と最適化手法
1. はじめに
位置測位における誤差は、デジタルマップ、資産追跡、屋内ナビゲーションなど高い精度を要求するアプリケーションにおいて、位置測位システムの精度に影響を与える重要な問題です。誤差は、信号干渉、マルチパス反射、ハードウェアの誤差、環境要因、データ処理アルゴリズムなど様々な原因から発生する可能性があります。
2. 位置測位における誤差の原因
2.1. 信号干渉
信号干渉は、特に GPS、WiFi、Bluetooth、UWB などの電波に基づく測位方法の精度を低下させる可能性があります。干渉源には以下が含まれます:
- 同じ周波数帯で動作する他の電子機器
- 壁、ガラス、金属などの物理的構造物による信号劣化
- 他の無線システムからの干渉
2.2. マルチパス効果
マルチパス反射は、壁、天井、床などの表面で反射することにより、信号が複数の方向から到達する現象です。これにより、実際の距離や位置の測定に誤差が生じます。
2.3. ハードウェアの誤差
センサー、アンテナ、測定機器は、解像度と感度の制限により固有の誤差を持つことがあります。例えば:
- IMU(慣性計測ユニット)センサーは時間とともに誤差を蓄積する可能性があります。
- 低コストの GPS デバイスは、専用デバイスよりも精度が低い傾向があります。
2.4. 環境の影響
天候、温度、湿度などの環境条件も信号特性を変化させ、位置測位の誤差を引き起こす可能性があります。
2.5. 処理アルゴリズムからの誤差
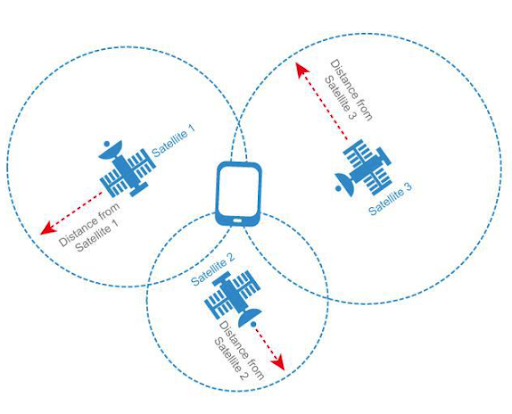
位置データ処理アルゴリズムは、適切に調整されていないと誤差につながる可能性があります。三辺測量、フィンガープリンティング、カルマンフィルターなどのアルゴリズムは、入力データが不正確な場合、効果的に機能しないことがあります。
3. 位置測位の誤差を最適化する方法
3.1. 信号フィルタリングアルゴリズムの使用
- カルマンフィルター:複数のソースからのデータを組み合わせてノイズを低減し、精度を向上させます。
- パーティクルフィルター:障害物の多い環境に効果的で、屋内測位の改善に役立ちます。
- AI&機械学習:収集されたデータに基づいて誤差を予測し、調整するために人工知能を活用します。
3.2. 複数の位置測位技術の組み合わせ
- GPS + IMU:GPS 測位と慣性センサーを組み合わせることで、GPS 信号が弱い場合の誤差を低減します。
- WiFi + BLE + UWB:異なる技術を使用して調整し、精度を向上させます。
3.3. ハードウェアインフラの改善
- 減衰を減らすために、より強力な電力を持つ信号トランスミッターを使用します。
- 測定ポイント間の距離を減らすためにより多くの信号ビーコンを追加し、精度を向上させます。
- ハードウェアの誤差を減らすために高品質なセンサーを使用します。
3.4. データ処理と調整
- 過去のデータに基づいて調整モデルを構築します。
- 実際の条件に応じて信号処理アルゴリズムを更新します。
- 統計的手法を用いて誤差補正技術を適用します。
3.5. マルチパス効果の低減
- 反射信号を識別して除去するアルゴリズムを使用します。
- より明確な信号経路を作成するために空間インフラを設定します。
- 直接信号と反射信号をより良く区別できる UWB 技術を適用します。
4. 結論
位置測位の誤差は重要な課題ですが、様々な方法で最適化することができます。技術の組み合わせ、ハードウェアインフラの改善、高度な処理アルゴリズムの適用、およびデータの調整は、位置測位システムの精度向上に役立ちます。特定のアプリケーションに応じて、企業は最高のパフォーマンスを達成するために適切な方法を選択する必要があります。


目次