'/%3e%3cpath%20d='M111.397%20125.67L105.593%20135.713L99.7989%20145.753L95.1406%20137.679L94.0069%20135.713L91.5066%20131.394C91.2954%20131.003%2091.0745%20130.62%2090.8342%20130.239L90.7735%20130.129L75.0581%20102.898V100.519C75.0581%2097.7732%2077.2837%2095.5476%2080.0292%2095.5476H94.0069L95.1406%2097.5163L111.397%20125.67Z'%20fill='white'/%3e%3cpath%20d='M72.2629%2076.2687C72.2629%2083.3627%2078.0137%2089.1134%2085.1076%2089.1134C92.2015%2089.1134%2097.9523%2083.3627%2097.9523%2076.2687C97.9523%2069.1748%2092.2015%2063.4241%2085.1076%2063.4241C78.0137%2063.4241%2072.2629%2069.1748%2072.2629%2076.2687Z'%20fill='url(%23paint1_linear_846_105547)'/%3e%3cpath%20d='M166.012%20105.461L166.012%20165.848C166.012%20171.375%20170.493%20175.856%20176.021%20175.856C181.549%20175.856%20186.03%20171.375%20186.03%20165.848L186.03%20105.461C186.03%2099.9332%20181.549%2095.4521%20176.021%2095.4521C170.493%2095.4521%20166.012%2099.9332%20166.012%20105.461Z'%20fill='url(%23paint2_linear_846_105547)'/%3e%3cpath%20d='M146.11%20125.782C148.653%20121.377%20155.386%20123.182%20155.386%20128.267V175.877H135.306V144.499L140.374%20135.714L146.11%20125.782Z'%20fill='url(%23paint3_linear_846_105547)'/%3e%3cpath%20d='M95.1412%20137.681V145.755C95.1475%20150.77%2093.8956%20155.707%2091.5%20160.113L90.7718%20161.358C87.1636%20167.312%2081.6081%20171.835%2075.0466%20174.161V102.9L90.7621%20130.131L90.8228%20130.241L91.4952%20131.396L93.9955%20135.715L95.1412%20137.681Z'%20fill='url(%23paint4_linear_846_105547)'/%3e%3cpath%20d='M196.133%2095.5476H176.053C170.508%2095.5476%20166.012%20100.043%20166.012%20105.589C166.012%20111.134%20170.508%20115.63%20176.053%20115.63H196.133C201.679%20115.63%20206.175%20111.134%20206.175%20105.589C206.175%20100.043%20201.679%2095.5476%20196.133%2095.5476Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_846_105547'%20x1='125.887'%20y1='95.5476'%20x2='125.887'%20y2='165.835'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_846_105547'%20x1='85.1076'%20y1='63.4241'%20x2='85.1076'%20y2='89.1134'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint2_linear_846_105547'%20x1='186.03'%20y1='95.4521'%20x2='186.03'%20y2='175.856'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint3_linear_846_105547'%20x1='145.346'%20y1='109.718'%20x2='145.346'%20y2='175.877'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint4_linear_846_105547'%20x1='85.0939'%20y1='102.9'%20x2='85.0939'%20y2='174.161'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%234D77FF'/%3e%3cstop%20offset='1'%20stop-color='white'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
Positioning Errors and Optimization Methods
1. Introduction
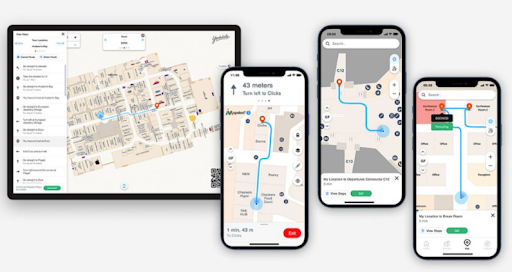
Positioning errors are an important issue affecting the accuracy of positioning systems, especially in applications requiring high accuracy such as digital maps, asset tracking, and indoor navigation. Errors can originate from various causes such as signal interference, multipath reflections, hardware errors, environmental factors, and data processing algorithms.
2. Causes of Positioning Errors
2.1. Signal Interference
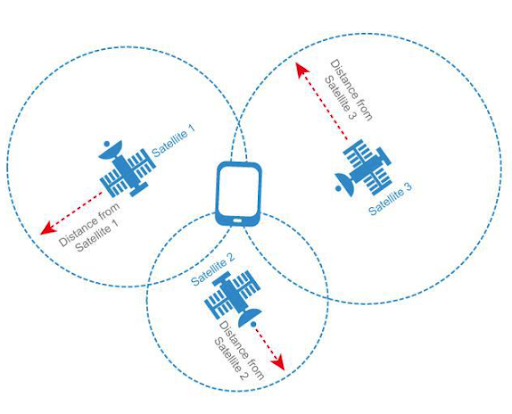
Signal interference can reduce the accuracy of positioning systems, especially methods based on radio waves such as GPS, WiFi, Bluetooth, or UWB. Sources of interference include:
- Other electronic devices operating in the same frequency range
- Physical structures like walls, glass, metal that degrade signals
- Interference from other wireless systems
2.2. Multipath Effect
Multipath reflections occur when signals arrive from multiple directions due to reflections from surfaces such as walls, ceilings, and floors. This causes errors in measuring actual distance or position.
2.3. Hardware Errors
Sensors, antennas, and measuring devices may have inherent errors due to limitations in resolution and sensitivity. For example:
- IMU (Inertial Measurement Unit) sensors can accumulate errors over time.
- Low-cost GPS devices typically have lower accuracy than specialized devices.
2.4. Environmental Influences
Environmental conditions such as weather, temperature, and humidity can also change signal characteristics, causing positioning errors.
2.5. Processing Algorithm Errors
Positioning data processing algorithms can lead to errors if not properly calibrated. Algorithms such as trilateration, fingerprinting, or Kalman Filter may perform poorly if input data is inaccurate.
3. Methods to Optimize Positioning Errors
3.1. Using Signal Filtering Algorithms
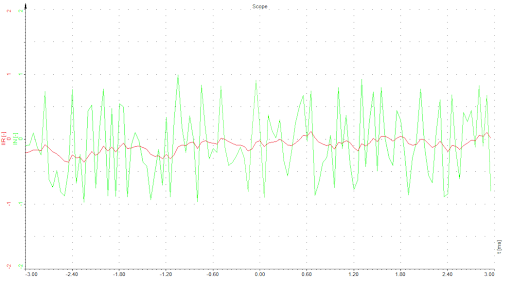
- Kalman Filter: Reduces noise and improves accuracy by combining data from multiple sources.
- Particle Filter: Effective for environments with many obstacles, helping improve indoor positioning.
- AI & Machine Learning: Leverages artificial intelligence to predict and calibrate errors based on collected data.
3.2. Combining Multiple Positioning Technologies
- GPS + IMU: Combining GPS positioning with inertial sensors helps reduce errors when GPS signals are weak.
- WiFi + BLE + UWB: Using different technologies to calibrate and enhance accuracy.
3.3. Improving Hardware Infrastructure
- Using signal transmitters with stronger power to reduce attenuation.
- Adding more signal beacons to reduce the distance between measurement points, increasing accuracy.
- Using higher-grade sensors to reduce hardware errors.
3.4. Data Processing and Calibration
- Building calibration models based on historical data.
- Updating signal processing algorithms according to real conditions.
- Applying error correction techniques using statistical methods.
3.5. Reducing Multipath Effects
- Using algorithms to identify and eliminate reflected signals.
- Setting up spatial infrastructure to create clearer signal paths.
- Applying UWB technology which has better ability to distinguish between direct and reflected signals.
4. Conclusion
Positioning errors are a significant challenge but can be optimized through various methods. Combining technologies, improving hardware infrastructure, applying advanced processing algorithms, and calibrating data will help enhance the accuracy of positioning systems. Depending on specific applications, businesses should choose appropriate methods to achieve the highest performance.